Simulation of swarms of unmanned ground vehicles
Overview
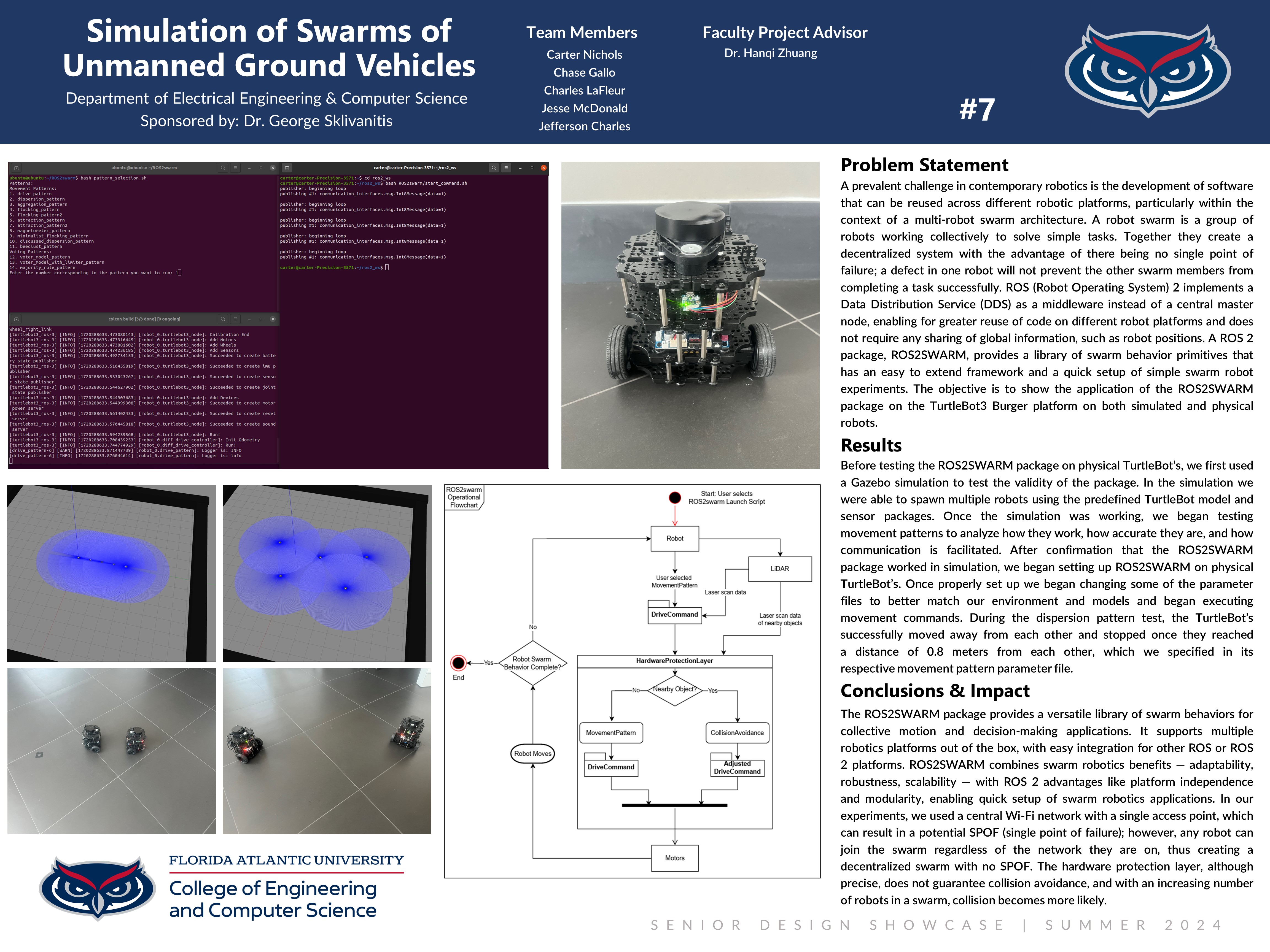
We implemented a ROS2 package called ROS2swarm which is used for multi-robot applications and works on command based execution. This means we give a command and each robot executes it independently based on what is reads in its surrounding environment. Each robot executing independently means we are working with a fully distributed system therefor removing any bottlenecks on the network.
Community Benefit
Multi-robot swarming is a huge topic in the robotic community right now especially with the advancement of drones. Having a software platform that can be easily integrated with multiple types of robotic platforms is highly desirable. Additionally, having a ready-to-use simulation to test new swarm commands is desirable for cost-efficiency and safety.
Team Members
Sponsored By:
Dr. George Sklivanitis