Development of a human-robot teaming test
Overview
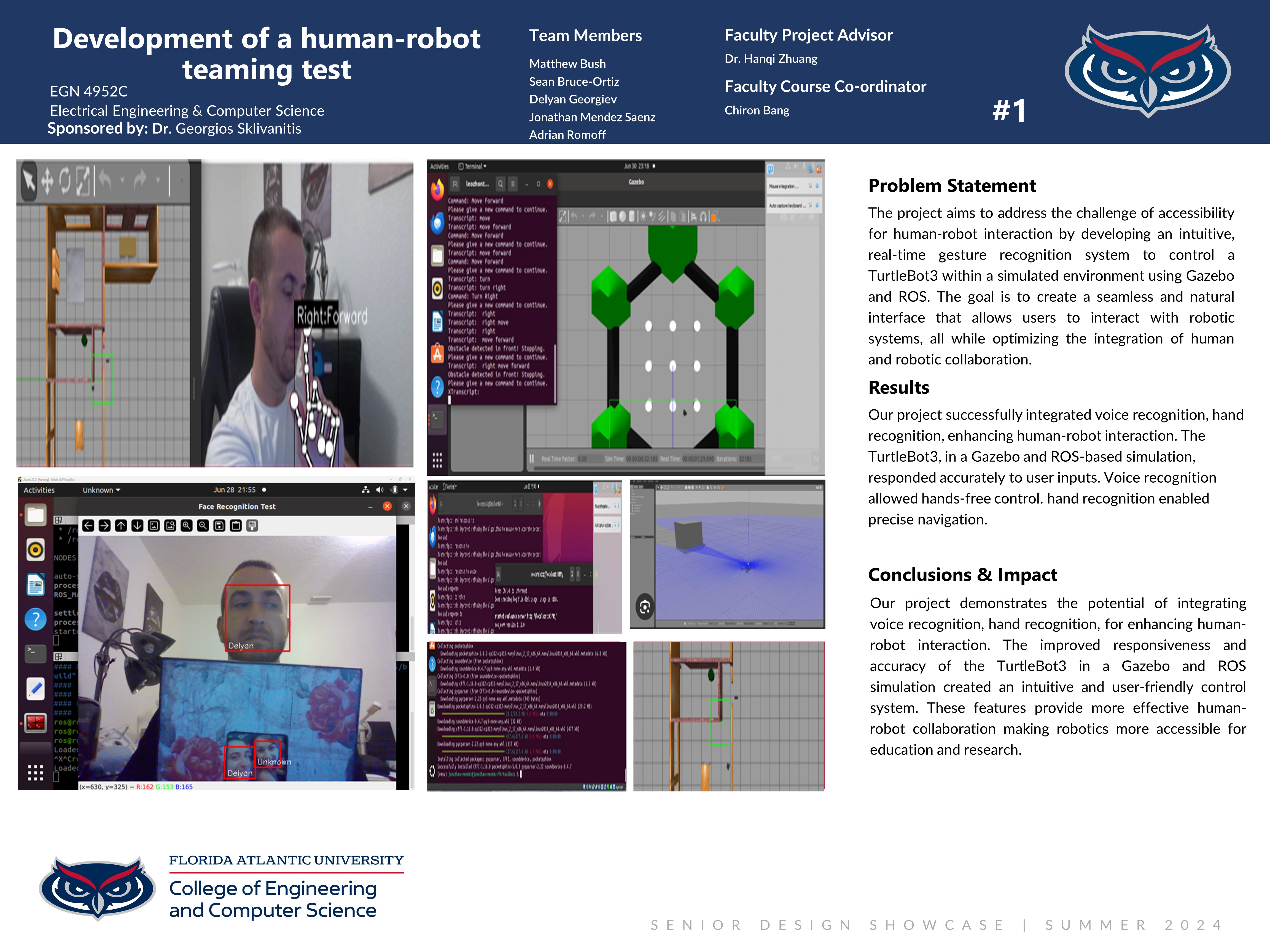
This project showcases how our group has developed a simulation in Gazebo utilizing ROS and TurtleBot3. We have established communication between the user and the robot through facial, gesture, and voice recognition. This communication facilitates user authentication, movement control, obstacle detection, and collision prevention.
Community Benefit
Key advantages of this project are: Education: Serving as a resource for learning and research. Inclusiveness: The simulation can be done at low cost without the need for a physical robot. Accessibility: Enabling easier interaction for individuals with disabilities. Security: Implemented by user authentication.
Team Members
Sponsored By:
George Sklivanitis, Ph.D.