Autonomous Collaborative Search and Mapping Robotic Dog
Overview
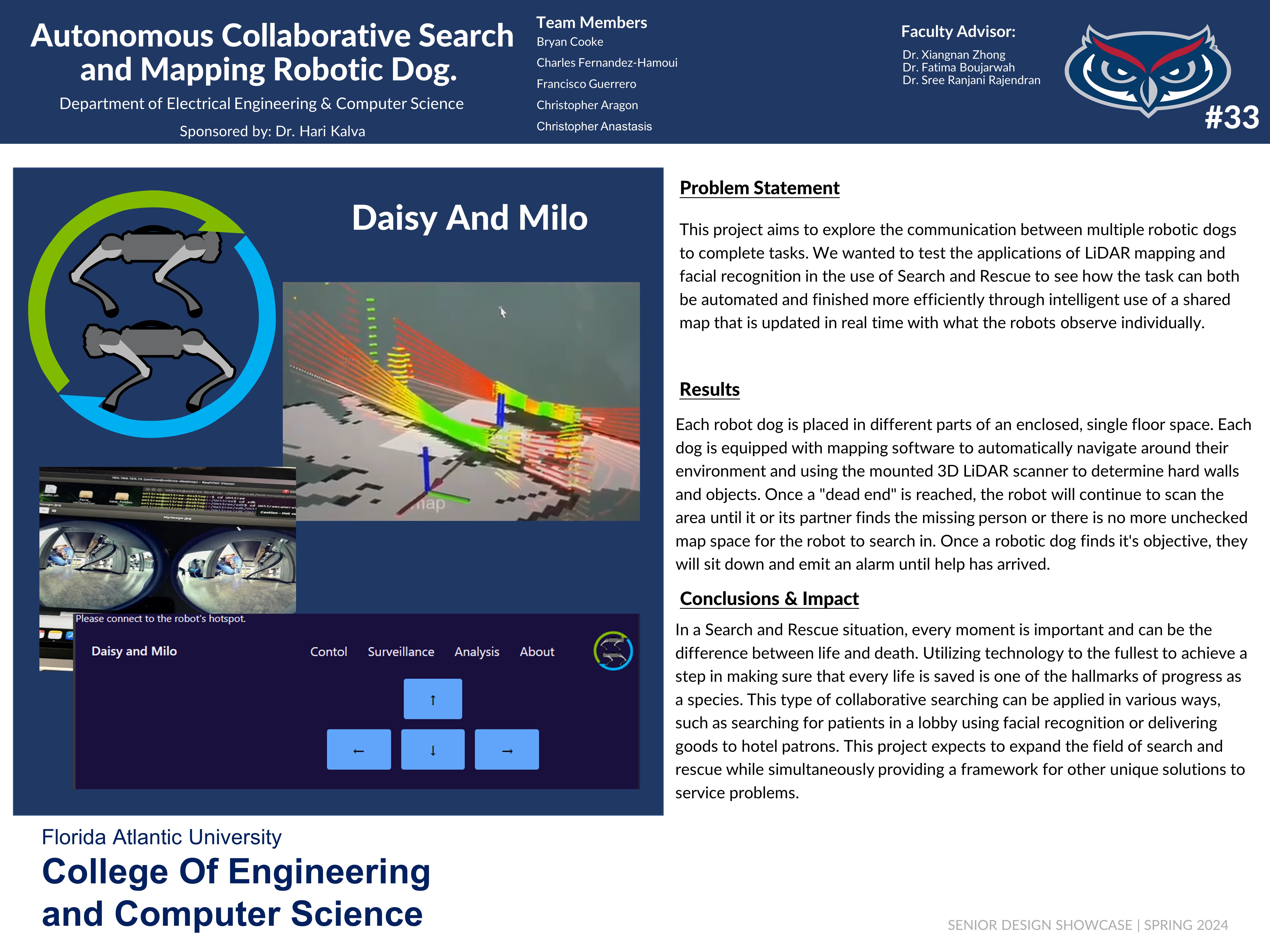
This project aims to explore the communicative abilities of robotic dogs. By using 3D LiDAR, a smart web app, artificial intelligence and a centralized ROS server, we can enable the robotic dogs to communicate together to complete tasks such as map creation. Collaboration, in tandem with facial recognition allows for the dogs to be able to search an area, and notify the user when it recognizes a person.
Community Benefit
We believe that after implementation, there are various applications and uses. Robotic dogs can be used to collaboratively search for active threats in buildings that may be hard or dangerous to navigate. Another potential application is the ability to search and find those missing after natural disasters strike.
Team Members
Sponsored By:
- Dr. Hary Kalva