ROBOTIC SOFT ACTUATOR ELBOW CONTRACTURE CORRECTION DEVICE
Overview
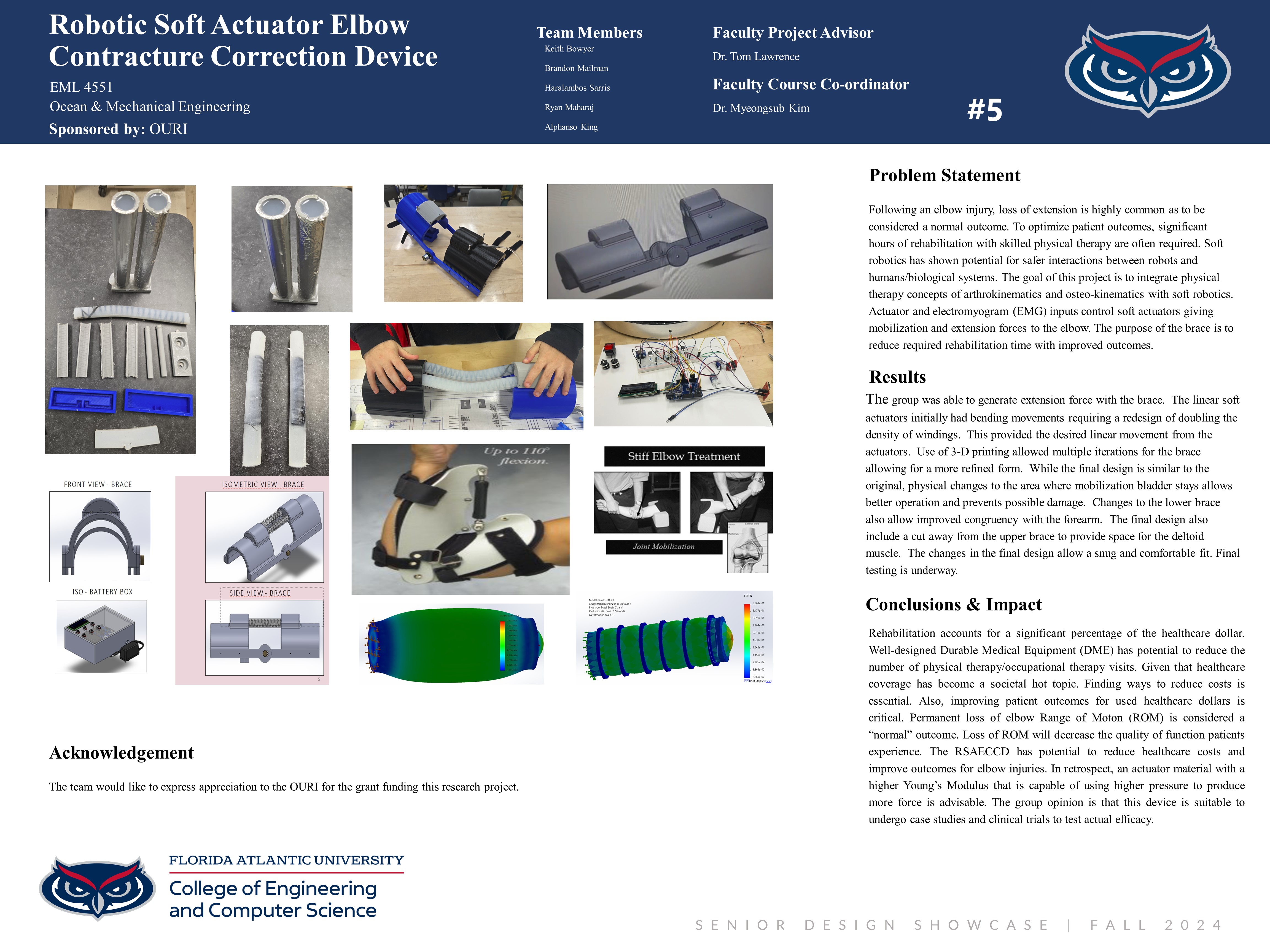
Following an elbow injury, loss of extension is highly common to be considered a normal outcome. To optimize patient outcomes, significant hours of rehabilitation with skilled physical therapy are often required. Soft robotics has shown potential for safer interactions between robots and humans/biological systems. The goal of this project is to integrate physical therapy concepts of arthrokinematics and osteo-kinematics with soft robotics. Actuator and electromyogram (EMG) inputs control soft actuators giving mobilization and extension forces to the elbow. The purpose of the brace is to reduce required rehabilitation time with improved outcomes.
Community Benefit
Rehabilitation accounts for a significant percentage of the healthcare dollar. Well-designed Durable Medical Equipment (DME) has potential to reduce the number of physical therapy/occupational therapy visits. Given that healthcare coverage has become a societal hot topic. Finding ways to reduce costs is essential. Also, improving patient outcomes for used healthcare dollars is critical. Permanent loss of elbow Range of Moton (ROM) is considered a “normal” outcome. Loss of ROM will decrease the quality of function patients experience. While still requiring case studies and clinical trials, The RSAECCD has potential to reduce healthcare costs and improve outcomes for elbow injuries.
Team Members
Sponsored By
OURI