soft robotic jellyfish
Department of Ocean and Mechanical Engineering
Overview
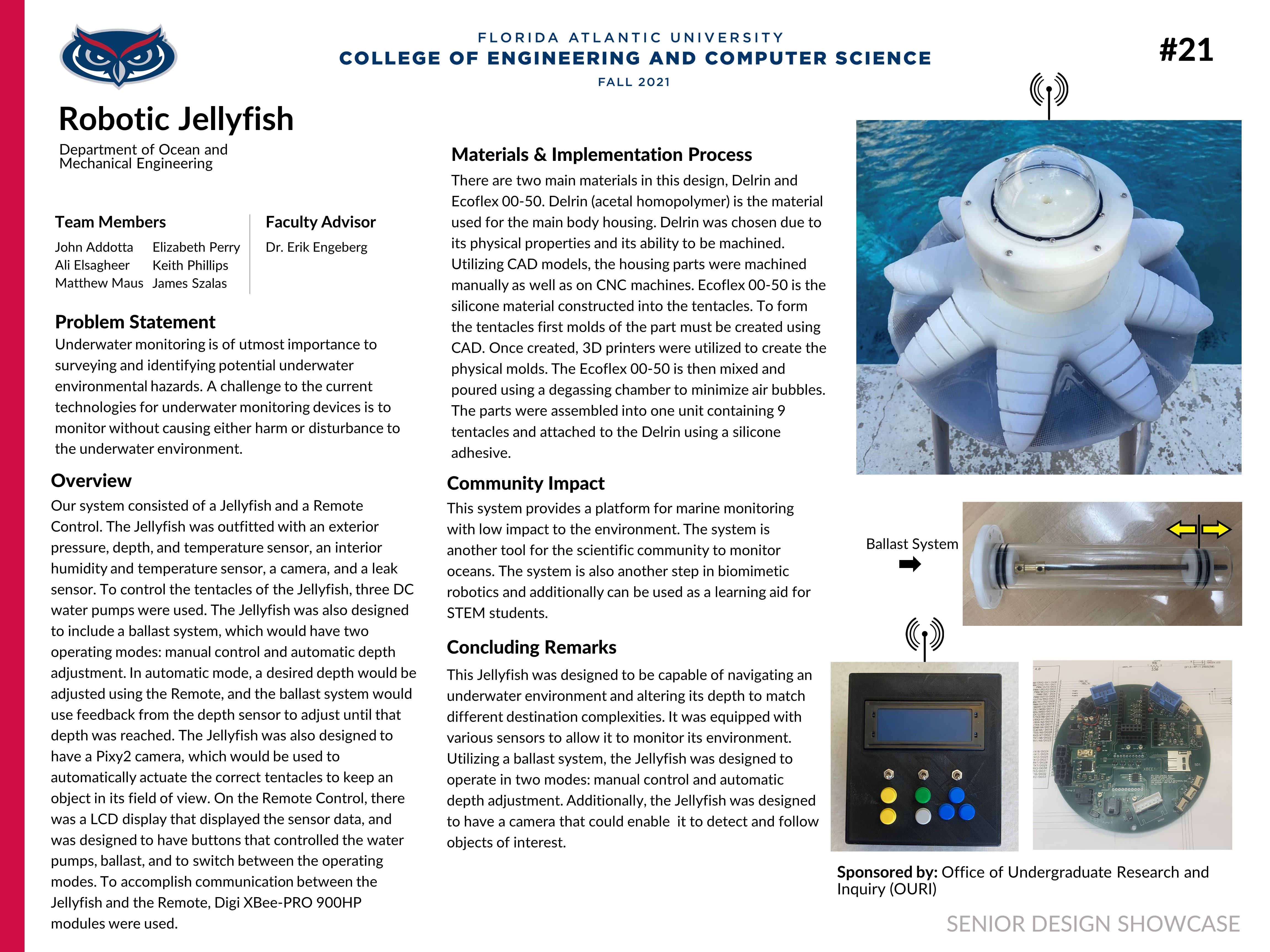
The Soft Robotic Jellyfish is a remote-controlled device that monitors exterior pressure, interior humidity, temperature, and depth. The device is equipped with a camera, an inertial measurement unit, and leak sensors. It contains three pumps to actuate the tentacles along with a ballast system that can adjust its depth. The remote control displays sensor information from the jellyfish and allows the pumps and the ballast system to be controlled.
Community Benefit: This project contributes to the field of underwater soft robotics. The device will be tested in tanks that have varying temperature and salinity levels. By monitoring its performance using the inertial measurement unit, conclusions can be drawn about the factors that affect the actuation of tentacles and buoyancy characteristics of the device. The range of motion of the tentacles in each environment is monitored using Kinovea software, which shows the impact of environmental factors on the tentacle material.
Team Members
Sponsor
|
FAU Office of Undergraduate Research and Inquiry (OURI) |
|
|